

电话:15314527846
传真:15314527846
邮箱:110934982@qq.com
地址:浙江省台州市开发区开发大道东段188号5号楼5楼5503
北京高精度康复机器人所知道国外的一些六维力传感器的校准方法,只是一份短短的读书笔记。真正的校准数据处理过程其实很复杂,通常需要用到小二乘法,还有一些数据处理的技巧。康复机器人品牌告诉您,在多元回归过程中有很多成熟的代码或者软件可以帮助完成。在校准配套的系统里,甚至还有成熟的软件直接得到校准结果,校准人员只需要点点鼠标就可以完成校准。
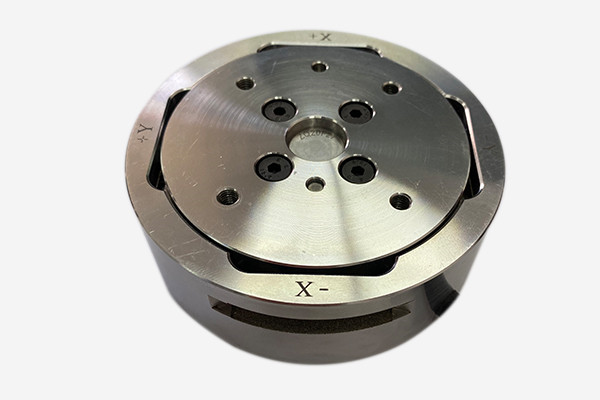
北京康复机器人告诉大家,六维力传感器通常分为固定端(机器人端)和加载端(工具端)。当两端受到相对应力时,传感器会发生弹性变形,并且传感器内部的应变仪电阻会发生变化,高精度康复机器人品牌提醒各位,然后转换为电压信号输出。
北京康复机器人告诉您,多维力传感器广泛应用于机器人手指、手爪研究;机器人外科手术研究;指力研究;牙齿研究;力反馈;刹车检测;精密装配、切削;复原研究;整形外科研究;产品测试;触觉反馈;示教学习。高精度康复机器人提醒您,行业覆盖了机器人、汽车制造、自动化流水线装配、生物力学、航空航天、轻纺工业等领域。

高精度康复机器人告诉您,防止三维力传感器接触腐蚀性或过热的介质;在测量气压时,打开过程管道顶部的压力水阀,并在过程管道的上部安装变送器;接线时,将电缆穿过防水连接器(附件)或软管,并拧紧密封螺母,以防止雨水通过电缆泄漏到变送器外壳中。北京康复机器人提醒您,如果冬季结冰,安装在室外的变送器需要采取防冻措施,以防止压力入口中的液体因结冰和损坏传感器而膨胀。在测量蒸汽或其他高温介质时,当缓冲管(线圈)在等待冷凝器时,变送器的工作温度不应超。防止残留物沉积在管道中。

康复机器人品牌告诉您,电阻应变片贴片用粘合剂主要采用双组分高分子环氧系列粘合剂,高分子化学产品的性能与各个组分的物理及化学指标密切相关,北京康复机器人打个比方,如纯度、分子链的结构和大小、储存时间、组分的配比、分子改性、混合方式、混合熟化使用时间、固化时间、固化温度、助剂及百分比等因素。

北京康复机器人告诉您,高频热噪声是由导体内部电子的不规则运动引起的。温度越高,电子运动越剧烈。电子在导体内部的不规则运动将在导体内部形成许多小的电流波动。因为它是无序运动,所以平均总电流为零,但是当将其用作组件(或作为电路的一部分)时,将其连接并放大。康复机器人品牌建议各位,电路完成后,内部电流将被放大并变为噪声源,尤其是在高频频段工作的电路的高频热噪声。


