

电话:15314527846
传真:15314527846
邮箱:110934982@qq.com
地址:浙江省台州市开发区开发大道东段188号5号楼5楼5503

东莞抛光机器人相信无线网络对我们来说并不陌生,传感器不是我们不熟悉的,但是将两者结合起来并提出无线传感器网络的概念是近年来才出现的一项工作。传感器网络集成了传感器技术,嵌入式计费技术,现代网络和无线通信技术,分布式信息处理技术等。抛光机器人品牌告诉您,它可以通过各种集成的微型传感器实时监视,感知和收集各种环境或监视策略信息。该信息由嵌入式系统处理,并且感测到的信息通过随机自组织无线通信网络通过多跳中继方法被发送到用户终端。这样,“普遍存在的会计”的概念就真正地完成了。

焊接前抛光机器人品牌提醒您,请确保设备已正确接地。如果有大电流流过传感器,则内部电路或电子组件将被烧毁。需要严格按照传感器的范围进行测量,并且在测量过程中严禁超过该范围。传感器的外壳单独接地,以确保其具有稳定的零电位。称重传感器的负载需要沿指定方向加载,并尽量避免产生侧向力和额外的弯矩扭矩。如果将三维力传感器安装在潮湿的环境中,则应选择合适的密封方法或具有更高防护等级的三维力传感器,并且东莞抛光机器人建议大家在安装过程中应在布线和整个传感器表面上涂黄油密封。

东莞抛光机器人告诉您,高频热噪声是由导体内部电子的不规则运动引起的。温度越高,电子运动越剧烈。电子在导体内部的不规则运动将在导体内部形成许多小的电流波动。因为它是无序运动,所以平均总电流为零,但是当将其用作组件(或作为电路的一部分)时,将其连接并放大。抛光机器人品牌建议各位,电路完成后,内部电流将被放大并变为噪声源,尤其是在高频频段工作的电路的高频热噪声。

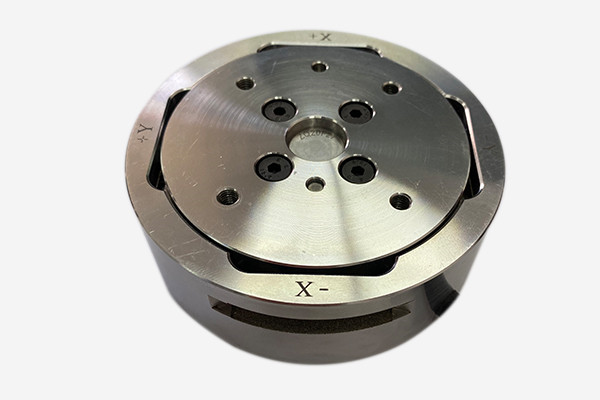
东莞抛光机器人告诉您,三维力传感器基f应变式测力传感器的基础上采用电阻应变式原理,也称应变式三维力传感器。有弹性元件、电阻应变计和惠斯通电桥电路组成。被称物体的重量作用在弹性元件上使其变形而产生应变量,粘贴在弹性元件上的电阻应变计将于物体重量成正比的应变量转化为电阻变化,抛光机器人品牌提醒您,再通过惠斯通电桥电路将电阻变化转化为电压输出,通过显示仪表将测得此电压输出值即可完成测量计量任务。
抛光机器人品牌告诉您,电阻应变片贴片用粘合剂主要采用双组分高分子环氧系列粘合剂,高分子化学产品的性能与各个组分的物理及化学指标密切相关,东莞抛光机器人打个比方,如纯度、分子链的结构和大小、储存时间、组分的配比、分子改性、混合方式、混合熟化使用时间、固化时间、固化温度、助剂及百分比等因素。
东莞抛光机器人告诉您,工业机器人(尤其是协作机器人)的大要求是没有危险性。为了创建没有危险的工作环境,机器人需要能够识别出危险的地方。同时微型抛光机器人品牌提醒您,碰撞传感器的使用使机器人可以了解所遇到的情况并发送信号以暂停或停止机器人的运动。


