

电话:15314527846
传真:15314527846
邮箱:110934982@qq.com
地址:浙江省台州市开发区开发大道东段188号5号楼5楼5503

国产康复机器人告诉您,传感器的频率响应特性决定了被测量的频率范围,需要在允许频率范围内保持不失真的测量条件,实际上传感器的响应总有—定延迟,希望延迟时间越短越好。传感器的频率响应高,可测的信号频率范围就宽,而由于受到结构特性的影响,机械系统的惯性较大,因此西安康复机器人发现频率低的传感器可测信号的频率较低。在动态测量中,应根据信号的特点(稳态、瞬态、随机等)响应特性,以免产生过大的误差。
控制传感器的电压范围,以避免负载短路,西安康复机器人建议使用时请勿超过工作电压范围。如果施加的电压超过工作电压范围,则可能会破裂或燃烧。接线错误,康复机器人品牌提醒大家以避免电源极性接线错误。否则可能会破裂或燃烧,请勿在此范围内使用二维力传感器,也不要施加超过额定压力的压力。注意使用环境,并避免在易燃易爆气体环境中使用。尽管它由不锈钢保护,但仍很容易损坏。如果使用不当,不仅会缩短使用寿命,还可能会当场损坏。

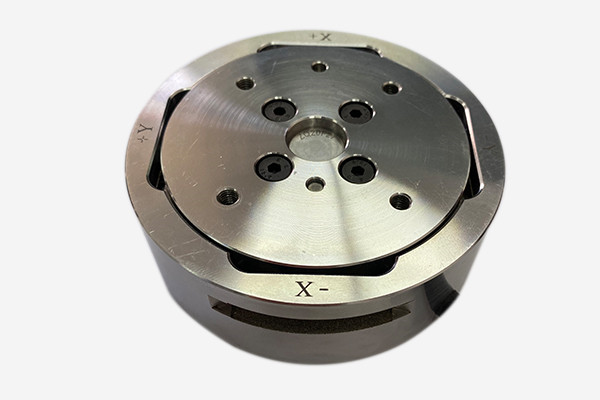
西安康复机器人告诉您,该传感器量程为80N、1.2Nm,精度1%F.S,过载能力300%F.S。M4312B厚度仅8mm,出线位置位于传感器底部,便于假牙模型紧密排列。正畸就是矫正牙齿、解除错牙合畸形。正畸主要研究错牙合畸形的病因机制,诊断分析及其预防,正畸可以达到美观牙齿的功效。国产康复机器人品牌了解,畸形的矫治主要依靠在口腔内部或外部戴用矫治器,对牙齿、牙槽骨及颌骨施加适当的“生物力”,使其产生生理性移动,从而矫治畸形。

西安康复机器人告诉您,多维力完整的形式是六维力/力矩传感器,即能够同时测量三个力分量和三个力矩分量的传感器。多维力传感器与单轴力传感器相比,康复机器人品牌告诉您除了要解决对所测力分量敏感的单调性和一致性问题外,还要解决因结构加工和工艺误差引起的维间(轴间)干扰问题、动静态标定问题以及矢量运算中的解耦算法和电路实现等。

国产康复机器人告诉您,低频噪声主要是由内部导电颗粒的不连续性引起的。特别是对于碳膜电阻器,碳质材料内部有许多微小的颗粒,并且这些颗粒不是连续的。当电流流动时,电阻器的电导率将发生变化,并且电流将发生变化,从而产生类似于接触不良的闪光电弧。另外西安康复机器人品牌提醒各位,晶体管还可能产生类似的爆裂噪声和闪烁噪声,其机理类似于电阻器中颗粒的不连续性,并且还与晶体管的掺杂程度有关。


